Trieste meets OpenAI Gym#
This notebook demonstrates how to use Trieste to apply Bayesian optimization to a problem that is slightly more practical than classical optimization benchmarks shown used in other tutorials. We will use OpenAI Gym, which is a popular toolkit for reinforcement learning (RL) algorithms.
Concretely, we are going to take the Lunar Lander environment, define a search space and describe it as an optimization problem, and use Trieste to find an optimal solution for the problem. And hopefully avoid too many landers crashing on the Moon surface along the way.
[1]:
import tensorflow as tf
import numpy as np
import trieste
import gpflow
import gym
env_name = "LunarLander-v2"
env = gym.make(env_name)
seed = 1793
np.random.seed(seed)
tf.random.set_seed(seed)
env.reset(seed=seed)
[1]:
(array([ 0.0079174 , 1.4154534 , 0.80192393, 0.20146185, -0.00916743,
-0.18164766, 0. , 0. ], dtype=float32),
{})
Introduction#
Let’s start by discussing the problem itself. In the Lunar Lander environment we are controlling a space module that needs to land on a Moon surface. The surface is piecewise linear and is generated randomly, but always has a flat landing pad in the middle (marked with flags on the renders). The module starts at the top with some random initial speed and direction. We are controlling three engines on the module: one on each side, and one at the bottom. At each step of the simulation we can choose to either fire one of the engines, or do nothing. The ultimate goal of the simulation is to land safely on the marked landing pad.
As usual in RL settings, the environment calculates reward points. Landing in the designated area gives the biggest reward, landing safely elsewhere is also rewarded but with less points. Crashing or flying off the screen results in big negative reward. Few points are also deducted along the way for firing up engines, thus motivating smaller usage of fuel. Additionally, to make the running time manageable, we are going to penalize simulations that take too long, by stopping them after a certain amount of steps and penalizing the reward.
Optimization problem#
Now let’s see how this task can be formulated as an optimization problem. We will be following an approach used by Turbo [EPG+19] and BOSH [MLR20] papers. The environment comes with a heuristic controller that makes decisions based on the current position and velocity of the module. This controller can be tuned by modifying 12 of its internal numerical parameters. These parameters form our optimization search space. The objective is the same as in the original RL setup: maximize the reward. Therefore we will be using Trieste to learn how to land the module safely on the designated pad, without taking too much time and wasting too much fuel.
The original code for the heuristic controller can be found in OpenAI Gym GitHub repo. Here is the parametrized version, taken from the repository of the Turbo paper:
[2]:
# controller code is copied verbatim from https://github.com/uber-research/TuRBO
# s is the state of the environment, an array of shape (1, 8)
# for details on its content see https://github.com/openai/gym/blob/master/gym/envs/box2d/lunar_lander.py
# w is the array of controller parameters, of shape (1, 12)
def heuristic_Controller(s, w):
angle_targ = s[0] * w[0] + s[2] * w[1]
if angle_targ > w[2]:
angle_targ = w[2]
if angle_targ < -w[2]:
angle_targ = -w[2]
hover_targ = w[3] * np.abs(s[0])
angle_todo = (angle_targ - s[4]) * w[4] - (s[5]) * w[5]
hover_todo = (hover_targ - s[1]) * w[6] - (s[3]) * w[7]
if s[6] or s[7]:
angle_todo = w[8]
hover_todo = -(s[3]) * w[9]
a = 0
if hover_todo > np.abs(angle_todo) and hover_todo > w[10]:
a = 2
elif angle_todo < -w[11]:
a = 3
elif angle_todo > +w[11]:
a = 1
return a
steps_limit = 1000
timeout_reward = -100
# this wrapper runs a single simulation of the landing
# for a given controller parameters values
# and computes the reward
# to keep running time reasonable simulation is stopped after `steps_limit` steps
def demo_heuristic_lander(env, w, print_reward=False):
total_reward = 0
steps = 0
s = env.reset()[0]
while True:
if steps > steps_limit:
total_reward -= timeout_reward
break
a = heuristic_Controller(s, w)
s, r, done, info, _ = env.step(a)
total_reward += r
steps += 1
if done:
break
if print_reward:
print(f"Total reward: {total_reward}")
return total_reward
In the original OpenAI Gym Lunar Lander code controller parameters have fixed values. The smallest parameter is set to 0.05, and the biggest parameter value is 1.0. Thus we will set the search range for each parameter to be the same from 0.0 to 1.2.
[3]:
search_space = trieste.space.Box([0.0] * 12, [1.2] * 12)
Let’s see what kind of reward we might get by just using random parameters from this search space. Usual reward values for the Lunar Lander environment are between -250 (terrible crash) to 250 (excellent landing).
[4]:
for _ in range(10):
sample_w = search_space.sample(1).numpy()[0]
demo_heuristic_lander(env, sample_w, print_reward=True)
Total reward: -143.34008359594347
Total reward: -196.76407326541357
Total reward: -116.5033796270748
Total reward: -103.5091914006611
Total reward: -26.151210025725646
Total reward: -12.448599828864289
Total reward: -93.24242157523328
Total reward: -265.69177133521464
Total reward: -96.88553601158213
Total reward: -160.57747812949776
As you can see, most of the random sets of parameters result in a negative reward. So picking a value from this search space at random can result in a various unwanted behaviors. Here we show some examples of the landing not going according to plan. Each of these examples was created with a sample of the parameter values from the search space.
Warning: all the videos in this notebook were pre-generated. Creating renders of OpenAI Gym environments requires various dependencies depending on software setups and operating systems, so we have chosen not to do it here in the interest of transferability of this notebook. For those interested in reproducing these videos, we have saved the input parameters and the code we used to generate them in the Trieste repository, in the folder next to this notebook. However because of the stochastic nature of the environment and the optimization described here, your results might differ slightly from those shown here.
[5]:
import io
import base64
from IPython.display import HTML
def load_video(filename):
video = io.open("./lunar_lander_videos/" + filename, "r+b").read()
encoded = base64.b64encode(video)
return HTML(
data="""
<video width="360" height="auto" alt="test" controls>
<source src="data:video/mp4;base64,{0}" type="video/mp4" />
</video>""".format(
encoded.decode("ascii")
)
)
Crash#
[6]:
load_video("crash.mp4")
[6]:
Timeout#
[7]:
load_video("timeout.mp4")
[7]:
Flying out of bounds#
[8]:
load_video("out_of_bounds.mp4")
[8]:
Slamming on the surface#
This is a very common failure mode in this environment - going too fast and slamming on the surface.
[9]:
load_video("slam.mp4")
[9]:
Since the reward is stochastic, our goal is to maximize its expectation (or rather here minimize its negated expectation since Trieste only deals with minimization problems). To decrease the observation noise, our observer returns the average of the reward over 10 runs.
[10]:
N_RUNS = 10
def lander_objective(x):
# for each point compute average reward over n_runs runs
all_rewards = []
for w in x.numpy():
rewards = [demo_heuristic_lander(env, w) for _ in range(N_RUNS)]
all_rewards.append(rewards)
rewards_tensor = tf.convert_to_tensor(all_rewards, dtype=tf.float64)
# triste minimizes, and we want to maximize
return -1 * tf.reshape(tf.math.reduce_mean(rewards_tensor, axis=1), (-1, 1))
observer = trieste.objectives.utils.mk_observer(lander_objective)
Solving the optimization problem with Trieste#
Here we do normal steps required to solve an optimization problem with Trieste: generate some initial data, create a surrogate model, define an acquisition funciton and rule, and run the optimization. Optimization step may take a few minutes to complete.
We are using standard Gaussian Process with an RBF kernel, and Augmented Expected Improvement [HANZ06] as an acquisition function that can handle higher noise.
[11]:
num_initial_points = 2 * search_space.dimension
initial_query_points = search_space.sample(num_initial_points)
initial_data = observer(initial_query_points)
[12]:
def build_model(data):
variance = tf.math.reduce_variance(data.observations)
kernel = gpflow.kernels.RBF(variance=variance)
gpr = gpflow.models.GPR(data.astuple(), kernel)
gpflow.set_trainable(gpr.likelihood, False)
# Since we are running multiple simulations per observation,
# it is possible to account for variations in observation noise
# by using a different likelihood variance for each observation.
# This is possible to model with VGP, as described here:
# https://gpflow.readthedocs.io/en/master/notebooks/advanced/varying_noise.html\
# In the interest of brevity we have chosen not to do it in this notebook.
return trieste.models.gpflow.GaussianProcessRegression(gpr)
model = build_model(initial_data)
[13]:
acq_fn = trieste.acquisition.function.AugmentedExpectedImprovement()
rule = trieste.acquisition.rule.EfficientGlobalOptimization(acq_fn) # type: ignore
[14]:
N_OPTIMIZATION_STEPS = 200
bo = trieste.bayesian_optimizer.BayesianOptimizer(observer, search_space)
result = bo.optimize(
N_OPTIMIZATION_STEPS, initial_data, model, rule
).final_result.unwrap()
Optimization completed without errors
Analyzing the results#
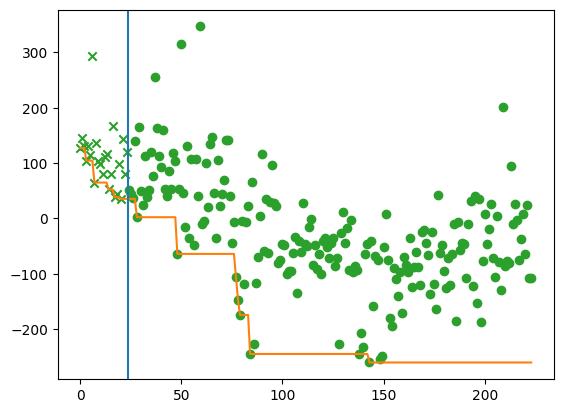
First, let’s just plot observations of the expected reward, to ensure Trieste indeed found a better configuration of the controller. Remember that we flipped the sign of the reward.
[15]:
from trieste.experimental import plotting
import matplotlib.pyplot as plt
ax = plt.gca()
plotting.plot_regret(
result.dataset.observations.numpy(), ax, num_init=len(initial_data)
)
Here we choose the query point that gives the best predictive expected reward according to our model. When running the simulation with at this point, we expect to see mostly large positive rewards.
[16]:
mean = result.model.predict(result.dataset.query_points)[0]
w_best = result.dataset.query_points[np.argmin(mean), :]
for _ in range(10):
demo_heuristic_lander(env, w_best.numpy(), print_reward=True)
Total reward: 212.17057566692807
Total reward: 244.61830779874842
Total reward: 248.6826692487161
Total reward: 259.2449011683434
Total reward: 253.36637752112966
Total reward: -103.03062367604038
Total reward: 38.57373088851966
Total reward: 254.72498432857486
Total reward: 238.62098469822809
Total reward: 270.7879288988521
Finally, let’s have a look at what the good controller configuration looks like in action.
Warning: as mentioned above, this video was also pre-generated.
[17]:
load_video("success.mp4")
[17]:
[ ]: