Inequality constraints#
[1]:
import numpy as np
import tensorflow as tf
np.random.seed(1799)
tf.random.set_seed(1799)
The problem#
In this tutorial, we replicate one of the results of [GKZ+14], specifically their synthetic experiment “simulation 1”, which consists of an objective function with a single constraint, defined over a two-dimensional input domain. We’ll start by defining the problem parameters. The constraint is satisfied when constraint(input_data) <= threshold.
[2]:
from trieste.space import Box
class Sim:
threshold = 0.5
@staticmethod
def objective(input_data):
x, y = input_data[..., -2], input_data[..., -1]
z = tf.cos(2.0 * x) * tf.cos(y) + tf.sin(x)
return z[:, None]
@staticmethod
def constraint(input_data):
x, y = input_data[:, -2], input_data[:, -1]
z = tf.cos(x) * tf.cos(y) - tf.sin(x) * tf.sin(y)
return z[:, None]
search_space = Box([0, 0], [6, 6])
2026-06-17 10:48:14,982 INFO util.py:154 -- Missing packages: ['ipywidgets']. Run `pip install -U ipywidgets`, then restart the notebook server for rich notebook output.
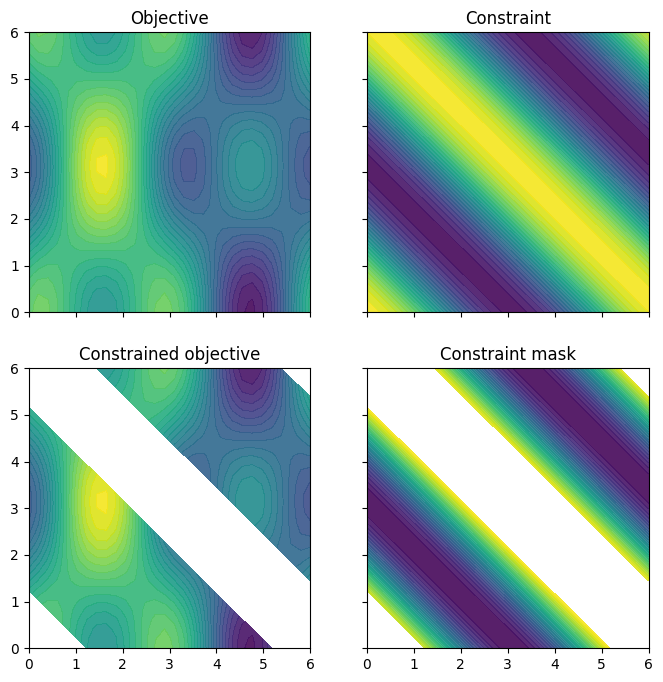
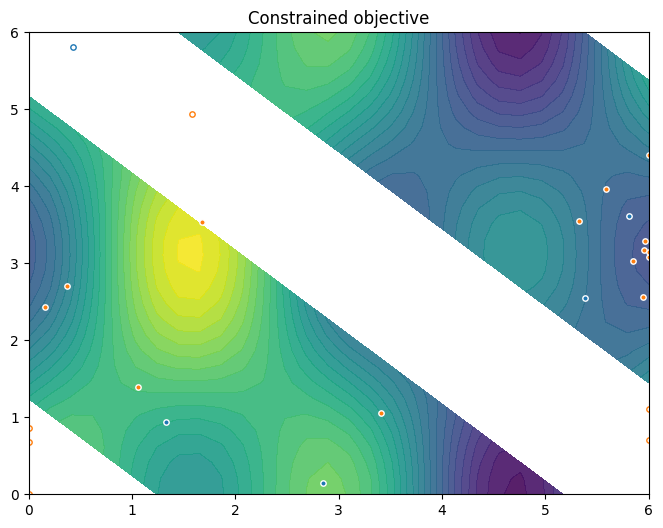
The objective and constraint functions are accessible as methods on the Sim class. Let’s visualise these functions, as well as the constrained objective. We get the constrained objective by masking out regions where the constraint function is above the threshold.
[3]:
import trieste
import matplotlib.pyplot as plt
from trieste.experimental.plotting import plot_objective_and_constraints
plot_objective_and_constraints(search_space, Sim)
plt.show()
We’ll make an observer that outputs both the objective and constraint data. Since the observer is outputting multiple datasets, we have to label them so that the optimization process knows which is which.
[4]:
from trieste.data import Dataset
OBJECTIVE = "OBJECTIVE"
CONSTRAINT = "CONSTRAINT"
def observer(query_points):
return {
OBJECTIVE: Dataset(query_points, Sim.objective(query_points)),
CONSTRAINT: Dataset(query_points, Sim.constraint(query_points)),
}
Let’s randomly sample some initial data from the observer …
[5]:
num_initial_points = 5
initial_data = observer(search_space.sample(num_initial_points))
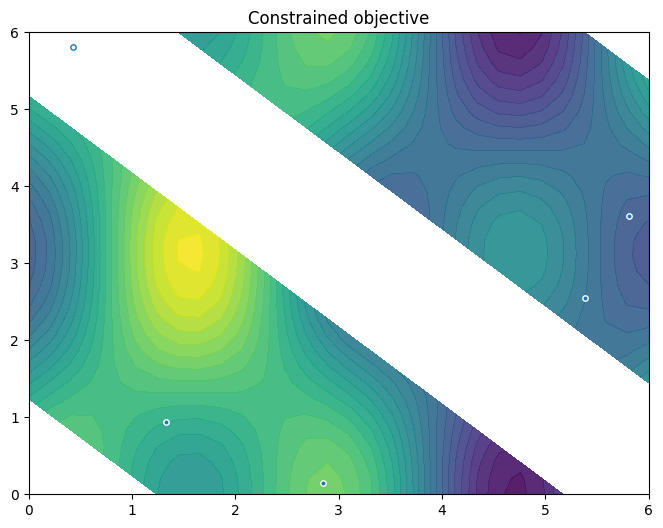
… and visualise those points on the constrained objective. Note how the generated data is labelled, like the observer.
[6]:
from trieste.experimental.plotting import plot_init_query_points
plot_init_query_points(
search_space,
Sim,
initial_data[OBJECTIVE].astuple(),
initial_data[CONSTRAINT].astuple(),
)
plt.show()
Modelling the two functions#
We’ll model the objective and constraint data with their own Gaussian process regression model, as implemented in GPflow. The GPflow models cannot be used directly in our Bayesian optimization routines, so we build a GPflow’s GPR model using Trieste’s convenient model build function build_gpr and pass it to the GaussianProcessRegression wrapper. Note that we set the likelihood variance to a small number because we are dealing with a noise-free problem.
[7]:
from trieste.models.gpflow import build_gpr, GaussianProcessRegression
def create_bo_model(data):
gpr = build_gpr(data, search_space, likelihood_variance=1e-7)
return GaussianProcessRegression(gpr)
initial_models = trieste.utils.map_values(create_bo_model, initial_data)
Define the acquisition process#
We can construct the expected constrained improvement acquisition function defined in [GKZ+14], where they use the probability of feasibility with respect to the constraint model.
[8]:
from trieste.acquisition.rule import EfficientGlobalOptimization
pof = trieste.acquisition.ProbabilityOfFeasibility(threshold=Sim.threshold)
eci = trieste.acquisition.ExpectedConstrainedImprovement(
OBJECTIVE, pof.using(CONSTRAINT)
)
rule = EfficientGlobalOptimization(eci) # type: ignore
Run the optimization loop#
We can now run the optimization loop. We obtain the final objective and constraint data using .try_get_final_datasets().
[9]:
num_steps = 20
bo = trieste.bayesian_optimizer.BayesianOptimizer(observer, search_space)
data = bo.optimize(
num_steps, initial_data, initial_models, rule, track_state=False
).try_get_final_datasets()
WARNING:tensorflow:5 out of the last 5 calls to <function probability_below_threshold.__call__ at 0x7f16e981f130> triggered tf.function retracing. Tracing is expensive and the excessive number of tracings could be due to (1) creating @tf.function repeatedly in a loop, (2) passing tensors with different shapes, (3) passing Python objects instead of tensors. For (1), please define your @tf.function outside of the loop. For (2), @tf.function has reduce_retracing=True option that can avoid unnecessary retracing. For (3), please refer to https://www.tensorflow.org/guide/function#controlling_retracing and https://www.tensorflow.org/api_docs/python/tf/function for more details.
WARNING:tensorflow:6 out of the last 6 calls to <function probability_below_threshold.__call__ at 0x7f16e981f130> triggered tf.function retracing. Tracing is expensive and the excessive number of tracings could be due to (1) creating @tf.function repeatedly in a loop, (2) passing tensors with different shapes, (3) passing Python objects instead of tensors. For (1), please define your @tf.function outside of the loop. For (2), @tf.function has reduce_retracing=True option that can avoid unnecessary retracing. For (3), please refer to https://www.tensorflow.org/guide/function#controlling_retracing and https://www.tensorflow.org/api_docs/python/tf/function for more details.
Optimization completed without errors
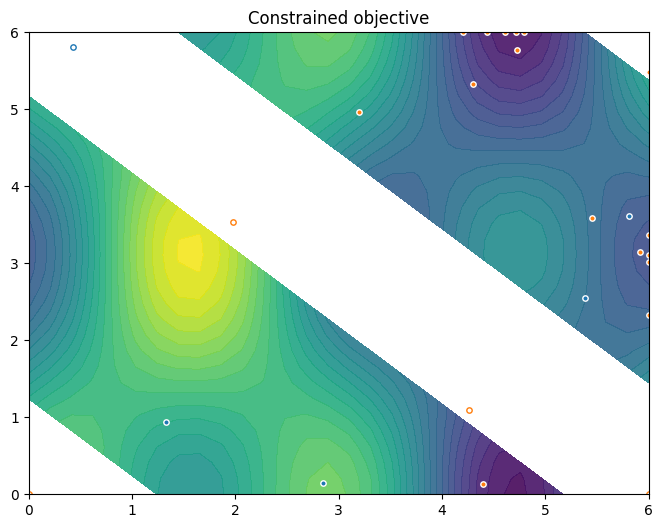
To conclude this section, we visualise the resulting data. Orange dots show the new points queried during optimization. Notice the concentration of these points in regions near the local minima.
[10]:
constraint_data = data[CONSTRAINT]
new_query_points = constraint_data.query_points[-num_steps:]
new_observations = constraint_data.observations[-num_steps:]
new_data = (new_query_points, new_observations)
plot_init_query_points(
search_space,
Sim,
initial_data[OBJECTIVE].astuple(),
initial_data[CONSTRAINT].astuple(),
new_data,
)
plt.show()
Batch-sequential strategy#
We’ll now look at a batch-sequential approach to the same problem. Sometimes it’s beneficial to query several points at a time instead of one. The acquisition function we used earlier, built by ExpectedConstrainedImprovement, only supports a batch size of 1, so we’ll need a new acquisition function builder for larger batch sizes. We can implement this using the reparametrization trick with the Monte-Carlo sampler BatchReparametrizationSampler. Note that when we do this, we must
initialise the sampler outside the acquisition function (here batch_efi). This is crucial: a given instance of a sampler produces repeatable, continuous samples, and we can use this to create a repeatable continuous acquisition function. Using a new sampler on each call would not result in a repeatable continuous acquisition function.
[11]:
class BatchExpectedConstrainedImprovement(
trieste.acquisition.AcquisitionFunctionBuilder
):
def __init__(self, sample_size, threshold):
self._sample_size = sample_size
self._threshold = threshold
def prepare_acquisition_function(self, models, datasets):
objective_model = models[OBJECTIVE]
objective_dataset = datasets[OBJECTIVE]
samplers = {
tag: trieste.models.gpflow.BatchReparametrizationSampler(
self._sample_size, model
)
for tag, model in models.items()
}
pf = trieste.acquisition.probability_below_threshold(
models[CONSTRAINT], self._threshold
)(tf.expand_dims(objective_dataset.query_points, 1))
is_feasible = pf >= 0.5
mean, _ = objective_model.predict(objective_dataset.query_points)
eta = tf.reduce_min(tf.boolean_mask(mean, is_feasible), axis=0)
def batch_efi(at):
samples = {
tag: tf.squeeze(sampler.sample(at), -1)
for tag, sampler in samplers.items()
}
feasible_mask = samples[CONSTRAINT] < self._threshold # [N, S, B]
improvement = tf.where(
feasible_mask, tf.maximum(eta - samples[OBJECTIVE], 0.0), 0.0
) # [N, S, B]
batch_improvement = tf.reduce_max(improvement, axis=-1) # [N, S]
return tf.reduce_mean(
batch_improvement, axis=-1, keepdims=True
) # [N, 1]
return batch_efi
num_query_points = 4
sample_size = 50
batch_eci = BatchExpectedConstrainedImprovement(sample_size, Sim.threshold)
batch_rule = EfficientGlobalOptimization( # type: ignore
batch_eci, num_query_points=num_query_points
)
We can now run the BO loop as before; note that here we also query twenty points, but in five batches of four points.
[12]:
initial_models = trieste.utils.map_values(create_bo_model, initial_data)
num_steps = 5
batch_data = bo.optimize(
num_steps, initial_data, initial_models, batch_rule, track_state=False
).try_get_final_datasets()
Optimization completed without errors
We visualise the resulting data as before.
[13]:
batch_constraint_data = batch_data[CONSTRAINT]
new_batch_data = (
batch_constraint_data.query_points[-num_query_points * num_steps :],
batch_constraint_data.observations[-num_query_points * num_steps :],
)
plot_init_query_points(
search_space,
Sim,
initial_data[OBJECTIVE].astuple(),
initial_data[CONSTRAINT].astuple(),
new_batch_data,
)
plt.show()
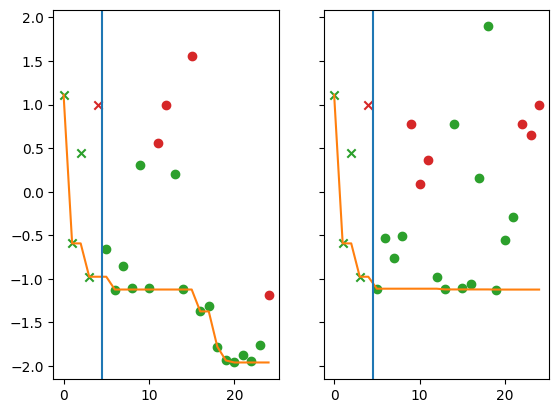
Finally, we compare the regret from the non-batch strategy (left panel) to the regret from the batch strategy (right panel). In the following plots each marker represents a query point. The x-axis is the index of the query point (where the first queried point has index 0), and the y-axis is the observed value. The vertical blue line denotes the end of initialisation/start of optimisation. Green points satisfy the constraint, red points do not.
[14]:
from trieste.experimental.plotting import plot_regret
mask_fail = constraint_data.observations.numpy() > Sim.threshold
batch_mask_fail = batch_constraint_data.observations.numpy() > Sim.threshold
fig, ax = plt.subplots(1, 2, sharey="all")
plot_regret(
data[OBJECTIVE].observations.numpy(),
ax[0],
num_init=num_initial_points,
mask_fail=mask_fail.flatten(),
)
plot_regret(
batch_data[OBJECTIVE].observations.numpy(),
ax[1],
num_init=num_initial_points,
mask_fail=batch_mask_fail.flatten(),
)
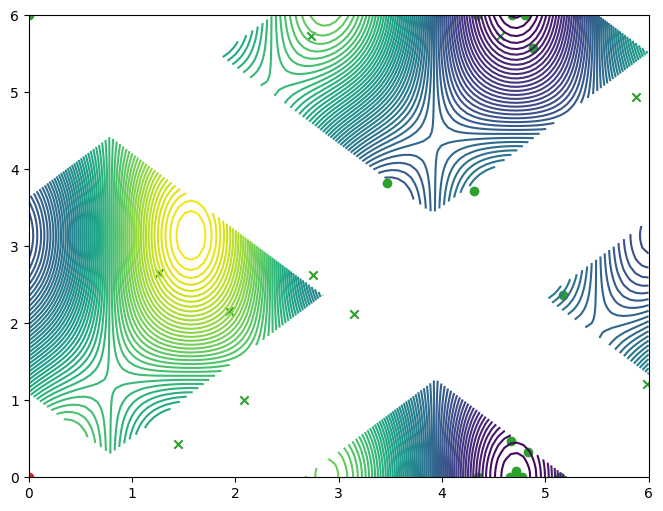
Constrained optimization with more than one constraint#
We’ll now show how to use a reducer to combine multiple constraints. The new problem Sim2 inherits from the previous one its objective and first constraint, but also adds a second constraint. We start by adding an output to our observer, and creating a set of three models.
[15]:
class Sim2(Sim):
threshold2 = 0.5
@staticmethod
def constraint2(input_data):
x, y = input_data[:, -2], input_data[:, -1]
z = tf.sin(x) * tf.cos(y) - tf.cos(x) * tf.sin(y)
return z[:, None]
CONSTRAINT2 = "CONSTRAINT2"
def observer_two_constraints(query_points):
return {
OBJECTIVE: Dataset(query_points, Sim2.objective(query_points)),
CONSTRAINT: Dataset(query_points, Sim2.constraint(query_points)),
CONSTRAINT2: Dataset(query_points, Sim2.constraint2(query_points)),
}
num_initial_points = 10
initial_data = observer_two_constraints(search_space.sample(num_initial_points))
initial_models = trieste.utils.map_values(create_bo_model, initial_data)
Now, the probability that the two constraints are feasible is the product of the two feasibilities. Hence, we combine the two ProbabilityOfFeasibility functions into one quantity by using a Product Reducer:
[16]:
from trieste.acquisition.combination import Product
pof1 = trieste.acquisition.ProbabilityOfFeasibility(threshold=Sim2.threshold)
pof2 = trieste.acquisition.ProbabilityOfFeasibility(threshold=Sim2.threshold2)
pof = Product(pof1.using(CONSTRAINT), pof2.using(CONSTRAINT2)) # type: ignore
We can now run the BO loop as before, and visualize the results:
[17]:
eci = trieste.acquisition.ExpectedConstrainedImprovement(OBJECTIVE, pof) # type: ignore
rule = EfficientGlobalOptimization(eci)
num_steps = 20
bo = trieste.bayesian_optimizer.BayesianOptimizer(
observer_two_constraints, search_space
)
data = bo.optimize(
num_steps, initial_data, initial_models, rule, track_state=False
).try_get_final_datasets()
constraint_data = data[CONSTRAINT]
new_query_points = constraint_data.query_points[-num_steps:]
new_observations = constraint_data.observations[-num_steps:]
new_data = (new_query_points, new_observations)
def masked_objective(x):
mask_nan = np.logical_or(
Sim2.constraint(x) > Sim2.threshold,
Sim2.constraint2(x) > Sim2.threshold2,
)
y = np.array(Sim2.objective(x))
y[mask_nan] = np.nan
return tf.convert_to_tensor(y.reshape(-1, 1), x.dtype)
mask_fail1 = (
data[CONSTRAINT].observations.numpy().flatten().astype(int) > Sim2.threshold
)
mask_fail2 = (
data[CONSTRAINT2].observations.numpy().flatten().astype(int)
> Sim2.threshold2
)
mask_fail = np.logical_or(mask_fail1, mask_fail2)
import matplotlib.pyplot as plt
from trieste.experimental.plotting import plot_function_2d, plot_bo_points
fig, ax = plot_function_2d(
masked_objective,
search_space.lower,
search_space.upper,
contour=True,
)
plot_bo_points(
data[OBJECTIVE].query_points.numpy(),
ax=ax[0, 0],
num_init=num_initial_points,
mask_fail=mask_fail,
)
plt.show()
Optimization completed without errors