Asynchronous batch Bayesian optimization#
As shown in Asynchronous Bayesian Optimization tutorial, Trieste provides support for running observations asynchronously. In that tutorial we used a greedy batch acquisition function called Local Penalization, and requested one new point whenever an observation was received. We also used the Python multiprocessing module to run distributed observations in parallel.
Here, we demonstrate a slightly different way of doing asynchronous Bayesian optimization. First, we make use of a non-greedy batch acquisition function, known as Batch Monte Carlo Expected Improvement. Second, we wait for several workers to finish, and then launch a new batch of points. However, since our batch size is smaller than the number of workers available, this approach is a hybrid between completely asynchronous and completely synchronous batch optimization. Note that greed acquisition functions also support batch sizes. Third, we use Ray to hide away most of the complexity of managing distributed workloads. There is no hard dependency in Trieste on a particular tool for parallel processing, and other libraries, such as Dask, can be used.
Together these two notebooks give a comprehensive overview of how to use Trieste in asynchronous scenarios.
[1]:
# silence TF warnings and info messages, only print errors
# https://stackoverflow.com/questions/35911252/disable-tensorflow-debugging-information
import os
os.environ["TF_CPP_MIN_LOG_LEVEL"] = "3"
import tensorflow as tf
tf.get_logger().setLevel("ERROR")
import ray
import numpy as np
import time
Just as in the other notebook on asynchronous optimization, we use Branin function with delays.
[2]:
from trieste.objectives import ScaledBranin
def objective(points, sleep=True):
if points.shape[1] != 2:
raise ValueError(
f"Incorrect input shape, expected (*, 2), got {points.shape}"
)
observations = []
for point in points:
observation = ScaledBranin.objective(point).numpy()
if sleep:
# insert some artificial delay that
# increases linearly with the absolute value of points
# which means our evaluations will take different time
delay = 3 * np.sum(point)
time.sleep(delay)
observations.append((point, observation))
return observations
[3]:
# Let's confirm our objective function works as expected
objective(np.array([[0.1, 0.5]]), sleep=False)
[3]:
[(array([0.1, 0.5]), array([-0.42052567]))]
To turn our objective function into a Ray task, we wrap it in a function with appropriate decorator. We are not using anything beyond Ray tasks API in this tutorial, and refer interested readers to Ray documentation and Ray crash course for more details.
[4]:
@ray.remote
def ray_objective(points, sleep=True):
return objective(points, sleep)
We prepare the model and some initial data to kick-start the optimization process.
[5]:
from trieste.space import Box
from trieste.data import Dataset
search_space = Box([0, 0], [1, 1])
num_initial_points = 3
initial_query_points = search_space.sample(num_initial_points)
initial_observations = objective(initial_query_points, sleep=False)
initial_data = Dataset(
query_points=initial_query_points,
observations=tf.constant(
[x[1] for x in initial_observations], dtype=tf.float64
),
)
import gpflow
from trieste.models.gpflow import GaussianProcessRegression, build_gpr
# We set the likelihood variance to a small number because
# we are dealing with a noise-free problem.
gpflow_model = build_gpr(initial_data, search_space, likelihood_variance=1e-7)
model = GaussianProcessRegression(gpflow_model)
Here we set up the configuration of our optimization run. See comments below for details.
[6]:
# Number of worker processes to run simultaneously
# Setting this to 1 will reduce our optimization to non-batch sequential
num_workers = 6
# Number of observations to collect
num_observations = 30
# Batch size of the acquisition function. We will wait for that many workers to return before launching a new batch
batch_size = 2
# Set this flag to False to disable sleep delays in case you want the notebook to execute quickly
enable_sleep_delays = True
Now we are ready to define the optimizer. Notice how we set the acquisition function to be BatchMonteCarloExpectedImprovement. It is also the default function used by the AsynchronousOptimization rule, but here we specify it explicitly for clarity. We also set the batch size.
[7]:
from trieste.acquisition.rule import AsynchronousOptimization
from trieste.acquisition.function import BatchMonteCarloExpectedImprovement
from trieste.ask_tell_optimization import AskTellOptimizer
monte_carlo_sample_size = 10000
acquisition_function = BatchMonteCarloExpectedImprovement(
sample_size=monte_carlo_sample_size
)
async_rule = AsynchronousOptimization(acquisition_function, num_query_points=batch_size) # type: ignore
async_bo = AskTellOptimizer(search_space, initial_data, model, async_rule)
Initialize Ray. This line will output the dashboard URL, which you can open in a separate tab to watch workers doing observations.
[8]:
ray.init(ignore_reinit_error=True)
2023-03-23 19:39:15,799 INFO worker.py:1535 -- Started a local Ray instance. View the dashboard at http://127.0.0.1:8265
[8]:
Ray
| Python version: | 3.7.16 |
| Ray version: | 2.2.0 |
| Dashboard: | http://127.0.0.1:8265 |
Here is the main optimization loop. First we ask for several batches of points to make sure all allocated workers are busy. Then we keep waiting for the workers to complete their tasks. Whenever batch_size of tasks came back, we tell Trieste new observations and ask for another batch of points.
[9]:
points_observed = 0
workers = []
# a helper function to launch a worker for a numpy array representing a single point
def launch_worker(x):
worker = ray_objective.remote(np.atleast_2d(x), enable_sleep_delays)
workers.append(worker)
# get first couple of batches of points and init all workers
for _ in range(int(num_workers / batch_size)):
points = async_bo.ask().numpy()
np.apply_along_axis(launch_worker, axis=1, arr=points)
finished_workers = []
while points_observed < num_observations:
ready_workers, remaining_workers = ray.wait(workers, timeout=0)
finished_workers += ready_workers
workers = remaining_workers
if len(finished_workers) < batch_size:
continue
# we saw enough results to ask for a new batch
new_observations = [
observation
for worker in finished_workers
for observation in ray.get(worker)
]
# new_observations is a list of tuples (point, observation value)
# here we turn it into a Dataset and tell it to Trieste
points_observed += len(new_observations)
new_data = Dataset(
query_points=tf.constant(
[x[0] for x in new_observations], dtype=tf.float64
),
observations=tf.constant(
[x[1] for x in new_observations], dtype=tf.float64
),
)
async_bo.tell(new_data)
# get a new batch of points
# and launch workers for each point in the batch
points = async_bo.ask().numpy()
np.apply_along_axis(launch_worker, axis=1, arr=points)
finished_workers = []
(raylet) Invalid -W option ignored: invalid action: '"ignore"'
(raylet) Invalid -W option ignored: invalid action: '"ignore"'
(raylet) [2023-03-23 19:40:15,797 E 3782 3782] (raylet) node_manager.cc:3097: 1 Workers (tasks / actors) killed due to memory pressure (OOM), 0 Workers crashed due to other reasons at node (ID: 045b0f903db406b8325ad6e7ba9da406137890a06a16e539f5e810a4, IP: 10.1.0.77) over the last time period. To see more information about the Workers killed on this node, use `ray logs raylet.out -ip 10.1.0.77`
(raylet)
(raylet) Refer to the documentation on how to address the out of memory issue: https://docs.ray.io/en/latest/ray-core/scheduling/ray-oom-prevention.html. Consider provisioning more memory on this node or reducing task parallelism by requesting more CPUs per task. To adjust the kill threshold, set the environment variable `RAY_memory_usage_threshold` when starting Ray. To disable worker killing, set the environment variable `RAY_memory_monitor_refresh_ms` to zero.
(raylet) Invalid -W option ignored: invalid action: '"ignore"'
(raylet) Invalid -W option ignored: invalid action: '"ignore"'
(raylet) [2023-03-23 19:42:15,799 E 3782 3782] (raylet) node_manager.cc:3097: 1 Workers (tasks / actors) killed due to memory pressure (OOM), 0 Workers crashed due to other reasons at node (ID: 045b0f903db406b8325ad6e7ba9da406137890a06a16e539f5e810a4, IP: 10.1.0.77) over the last time period. To see more information about the Workers killed on this node, use `ray logs raylet.out -ip 10.1.0.77`
(raylet)
(raylet) Refer to the documentation on how to address the out of memory issue: https://docs.ray.io/en/latest/ray-core/scheduling/ray-oom-prevention.html. Consider provisioning more memory on this node or reducing task parallelism by requesting more CPUs per task. To adjust the kill threshold, set the environment variable `RAY_memory_usage_threshold` when starting Ray. To disable worker killing, set the environment variable `RAY_memory_monitor_refresh_ms` to zero.
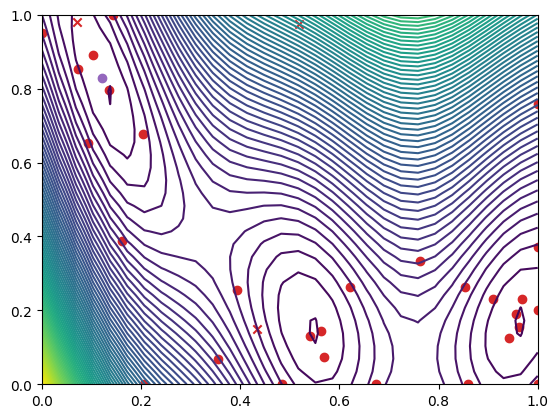
Let’s plot the objective function and the points the optimization procedure explored.
[10]:
from trieste.experimental.plotting import plot_function_2d, plot_bo_points
dataset = async_bo.to_result().try_get_final_dataset()
arg_min_idx = tf.squeeze(tf.argmin(dataset.observations, axis=0))
query_points = dataset.query_points.numpy()
observations = dataset.observations.numpy()
_, ax = plot_function_2d(
ScaledBranin.objective,
search_space.lower,
search_space.upper,
grid_density=30,
contour=True,
)
plot_bo_points(
query_points, ax[0, 0], num_initial_points, arg_min_idx, c_pass="tab:red"
)
[11]:
ray.shutdown() # "Undo ray.init()". Terminate all the processes started in this notebook.